Векторы на ЕГЭ по математике. Действия над векторами. Векторы: определение и основные понятия Обозначение векторов
Вектором называется направленный отрезок прямой евклидова пространства, у которого один конец (точка A) называется началом вектора, а другой конец (точка B) концом вектора (Рис. 1). Векторы обозначаются:

Если начало и конец вектора совпадают, то вектор называется нулевым вектором и обозначается 0 .
Пример. Пусть в двухмерном пространстве начало вектора имеет координаты A (12,6) , а конец вектора - координаты B (12,6). Тогда вектор является нулевым вектором.
Длина отрезка AB называется модулем (длиной , нормой ) вектора и обозначается |a |. Вектор длины, равной единице, называется единичным вектором . Кроме модуля вектор характеризуется направлением: вектор имеет направление от A к B . Вектор называется вектором, противоположным вектору .

Два вектора называются коллинеарными , если они лежат на одной прямой или на параллельных прямых. На рисунке Рис. 3 красные векторы коллинеарны, т.к. они лажат на одной прямой, а синие векторы коллинеарны, т.к. они лежат на параллельных прямых. Два коллинеарных вектора называются одинаково направленными , если их концы лежат по одну сторону от прямой, соединяющей их начала. Два коллинеарных вектора называются противоположно направленными , если их концы лежат по разные стороны от прямой, соединяющей их начала. Если два коллинеарных вектора лежат на одной прямой, то они называются одинаково направленными, если один из лучей, образованным одним вектором полностью содержит луч, образованным другим вектором. В противном случае векторы называются противоположно направленными. На рисунке Рис.3 синие векторы одинаково направлены, а красные векторы противоположно направлены.

Два вектора называются равными если они имеют равные модули и одинаково направлены. На рисунке Рис.2 векторы равны т.к. их модули равны и имеют одинаковое направление.
Векторы называются компланарными , если они лежат на одной плоскости или в параллельных плоскостях.
В n мерном векторном пространстве рассмотрим множество всех векторов, начальная точка которых совпадает с началом координат. Тогда вектор можно записать в следующем виде:
| (1) |
где x 1 , x 2 , ..., x n координаты конечной точки вектора x .
Вектор, записанный в виде (1) называется вектор-строкой , а вектор, записанный в виде
| (2) |
называется вектор-столбцом .
Число n
называется размерностью
(порядком
) вектора. Если ![]() то вектор называется нулевым вектором
(т.к. начальная точка вектора
то вектор называется нулевым вектором
(т.к. начальная точка вектора ![]() ). Два вектора x
и y
равны тогда и только тогда, когда равны их соответствующие элементы.
). Два вектора x
и y
равны тогда и только тогда, когда равны их соответствующие элементы.
ВЕКТОР
В физике и математике вектор - это величина, которая характеризуется своим численным значением и направлением. В физике встречается немало важных величин, являющихся векторами, например сила, положение, скорость, ускорение, вращающий момент, импульс, напряженность электрического и магнитного полей. Их можно противопоставить другим величинам, таким, как масса, объем, давление, температура и плотность, которые можно описать обычным числом, и называются они "скалярами". Векторная запись используется при работе с величинами, которые невозможно задать полностью с помощью обычных чисел. Например, мы хотим описать положение предмета относительно некоторой точки. Мы можем сказать, сколько километров от точки до предмета, но не можем полностью определить его местоположение, пока не узнаем направление, в котором он находится. Таким образом, местонахождение предмета характеризуется численным значением (расстоянием в километрах) и направлением. Графически векторы изображаются в виде направленных отрезков прямой определенной длины, как на рис. 1. Например, для того чтобы представить графически силу в пять килограммов, надо нарисовать отрезок прямой длиной в пять единиц в направлении действия силы. Стрелка указывает, что сила действует от A к B; если бы сила действовала от B к A, то мы бы записали или Для удобства векторы обычно обозначаются полужирными прописными буквами (A, B, C и так далее); векторы A и -A имеют равные численные значения, но противоположны по направлению. Численное значение вектора А называется модулем или длиной и обозначается A или |A|. Это величина, конечно, скаляр. Вектор, начало и конец которого совпадают, называется нулевым и обозначается O.
Два вектора называются равными (или свободными), если их модули и направления совпадают. В механике и физике этим определением, однако, надо пользоваться с осторожностью, так как две равных силы, приложенные к различным точкам тела в общем случае будут приводить к различным результатам. В связи с этим векторы подразделяются на "связанные" или "скользящие", следующим образом: Связанные векторы имеют фиксированные точки приложения. Например, радиус-вектор указывает положение точки относительно некоторого фиксированного начала координат. Связанные векторы считаются равными, если у них совпадают не только модули и направления, но они имеют и общую точку приложения. Скользящими векторами называются равные между собой векторы, расположенные на одной прямой.
Сложение векторов.
Идея сложения векторов возникла из того, что мы можем найти единственный вектор, который оказывает то же воздействие, что и два других вектора вместе. Если для того, чтобы попасть в некоторую точку, нам надо пройти сначала A километров в одном направлении и затем B километров в другом направлении, то мы могли бы достичь нашей конечной точки пройдя C километров в третьем направлении (рис. 2). В этом смысле можно сказать, что

A + B = C.
Вектор C называется "результирующим вектором" A и B, он задается построением, показанным на рисунке; на векторах A и B как на сторонах построен параллелограмм, а C - диагональ, соединяющая начало А и конец В. Из рис. 2 видно, что сложение векторов "коммутативно", т.е. A + B = B + A. Аналогичным образом можно сложить несколько векторов, последовательно соединяя их "непрерывной цепочкой", как показано на рис. 3 для трех векторов D, E и F. Из рис. 3 также видно, что

(D + E) + F = D + (E + F), т.е. сложение векторов ассоциативно. Суммировать можно любое число векторов, причем векторы необязательно должны лежать в одной плоскости. Вычитание векторов представляется как сложение с отрицательным вектором. Например, A - B = A + (-B), где, как определялось ранее, -B - вектор, равный В по модулю, но противоположный по направлению. Это правило сложения может теперь использоваться как реальный критерий проверки, является ли некоторая величина вектором или нет. Перемещения обычно подчиняются условиям этого правила; то же можно сказать и о скоростях; силы складываются таким же образом, как можно было видеть из "треугольника сил". Однако, некоторые величины, обладающие как численными значениями так и направлениями, не подчиняются этому правилу, поэтому не могут рассматриваться как векторы. Примером являются конечные вращения.
Умножение вектора на скаляр. Произведение mA или Am, где m (m № 0) - скаляр, а A - ненулевой вектор, определяется как другой вектор, который в m раз длиннее A и имеет тоже направление что и A, если число m положительно, и противоположное, если m отрицательно, как показано на рис. 4, где m равно 2 и -1/2 соответственно. Кроме того, 1A = A, т.е. при умножении на 1 вектор не изменяется. Величина -1A - вектор, равный A по длине, но противоположный по направлению, обычно записывается как -A. Если А - нулевой вектор и(или) m = 0, то mA - нулевой вектор. Умножение дистрибутивно, т.е.


Мы можем складывать любое число векторов, причем порядок слагаемых не влияет на результат. Верно и обратное: любой вектор раскладывается на две или более "компоненты", т.е. на два вектора или более, которые, будучи сложенными, в качестве результирующего дадут исходный вектор. Например, на рис. 2, A и B - компоненты C. Многие математические действия с векторами упрощаются, если разложить вектор на три компоненты по трем взаимно перпендикулярным направлениям. Выберем правую систему декартовых координат с осями Ox, Oy и Oz как показано на рис. 5. Под правой системой координат мы подразумеваем, что оси x, y и z располагаются так, как могут быть расположены соответственно большой, указательный и средний пальцы правой руки. Из одной правой системы координат всегда можно получить другую правую систему координат соответствующим вращением. На рис. 5, показано разложение вектор A на три компоненты и Они в сумме составляют вектор A , так как


Следовательно,
![]()
Можно было бы также сначала сложить и получитьа затем к прибавить Проекции вектора А на три координатные оси, обозначенные Ax, Ay и Az называются "скалярными компонентами" вектора A:

где a, b и g - углы между A и тремя координатными осями. Теперь введем три вектора единичной длины i, j и k (орты), имеющие то же самое направление, что и соответствующие оси x, y и z. Тогда, если Ax умножить на i, то полученное произведение - это вектор, равный и
Два вектора равны тогда и только тогда, когда равны их соответствующие скалярные компоненты. Таким образом, A = B тогда и только тогда, когда Ax = Bx, Ay = By, Az = Bz. Два вектора можно сложить, складывая их компоненты:

Кроме того, по теореме Пифагора:
![]()
Линейные функции. Выражение aA + bB, где a и b - скаляры, называется линейной функцией векторов A и B. Это вектор, находящийся в той же плоскости, что A и B; если A и B не параллельны, то при изменении a и b вектор aA + bB будет перемещаться по всей плоскости (рис. 6). Если A, B и C не все лежат в одной плоскости, то вектор aA + bB + cC (a, b и c изменяются) перемещается по всему пространству. Предположим, что A, B и C - единичные векторы i, j и k. Вектор ai лежит на оси x; вектор ai + bj может перемещаться по всей плоскости xy; вектор ai + bj + ck может перемещаться по всему пространству.

Можно было бы выбрать четыре взаимно перпендикулярных вектора i, j, k и l и определить четырехмерный вектор как величину A = Axi + Ayj + Azk + Awl
с длиной
![]()
а можно было бы продолжать до пяти, шести или любого числа измерений. Хотя визуально такой вектор представить невозможно, никаких математических трудностей здесь не возникает. Такая запись часто бывает полезна; например, состояние движущейся частицы описывается шестимерным вектором P (x, y, z, px, py, pz), компоненты которого - ее положение в пространстве (x, y, z) и импульс (px, py, pz). Такое пространство называется "фазовым пространством"; если мы рассматриваем две частицы, то фазовое пространство 12-мерное, если три, то 18-ти и так далее. Число размерностей можно неограниченно увеличивать; при этом величины, с которыми мы будем иметь дело, ведут себя во многом также, как те, которые мы рассмотрим в оставшейся части этой статьи, а именно, трехмерные векторы.
Умножение двух векторов.
Правило сложения векторов было получено путем изучения поведения величин, представленных векторами. Нет никаких видимых причин, по которым два вектора нельзя было бы каким-либо образом перемножить, однако это умножение будет иметь смысл только в том случае, если можно показать его математическую состоятельность; кроме того, желательно, чтобы произведение имело определенный физический смысл. Существуют два способа умножения векторов, которые соответствуют этим условиям. Результатом одного из них является скаляр, такое произведение называется "скалярным произведением" или "внутренним произведением" двух векторов и записывается AЧB или (A, B). Результатом другого умножения является вектор, называемый "векторным произведением" или "внешним произведением" и записывается A*B или []. Скалярные произведения имеют физический смысл для одного-, двух- или трех измерений, тогда как векторные произведения определены только для трех измерений.
Скалярные произведения.
Если под действием некоторой силы F точка, к которой она приложена, перемещается на расстояние r, то выполненная работа равна произведению r и компоненты F в направлении r. Эта компонента равна F cos бF, rс, где бF, rс - угол между F и r, т.е. Произведенная работа = Fr cos бF, rс. Это - пример физического обоснования скалярного произведения, определенного для любых двух векторов A, B посредством формулы
A*B = AB cos бA, Bс.
Так как все величины правой части уравнения - скаляры, то A*B = B*A; следовательно, скалярное умножение коммутативно. Скалярное умножение также обладает свойством дистрибутивности: A*(B + С) = A*B + A*С. Если векторы A и B перпендикулярны, то cos бA, Bс равен нулю, и, поэтому, A*B = 0, даже если ни A, ни B не равны нулю. Именно поэтому мы не можем делить на вектор. Допустим, что мы разделили обе части уравнения A*B = A*C на A. Это дало бы B = C, и, если бы можно было бы выполнить деление, то это равенство стало бы единственным возможным результатом. Однако, если мы перепишем уравнение A*B = A*C в виде A*(B - C) = 0 и вспомним, что (B - C) - вектор, то ясно, что (B - C) необязательно равен нулю и, следовательно, B не должен быть равным C. Эти противоречивые результаты показывают, что векторное деление невозможно. Скалярное произведение дает еще один способ записи численного значения (модуля) вектора: A*A = AA*cos 0° = A2;
поэтому
Скалярное произведение можно записать и другим способом. Для этого вспомним, что: A = Ax i + Ayj + Azk. Заметим, что

Тогда,

Поскольку последнее уравнение содержит x, y и z в качестве нижних индексов, уравнение, казалось бы, зависит от выбранной конкретной системы координат. Однако это не так, что видно из определения, которое не зависит от выбранных координатных осей.
Векторные произведения.
Векторным или внешним произведением векторов называется вектор, модуль которого равен произведению их модулей на синус угла, перпендикулярный исходным векторам и составляющий вместе с ними правую тройку. Это произведение легче всего ввести, рассматривая соотношение между скоростью и угловой скоростью. Первая - вектор; мы теперь покажем, что последнюю также можно интерпретировать как вектор. Угловая скорость вращающегося тела определяется следующим образом: выберем любую точку на теле и проведем перпендикуляр из этой точки до оси вращения. Тогда угловая скорость тела - это число радиан, на которые эта линия повернулась за единицу времени. Если угловая скорость - вектор, она должна иметь численное значение и направление. Численное значение выражается в радианах в секунду, направление можно выбрать вдоль оси вращения, можно его определить, направив вектор в том направлении, в котором двигался бы правосторонний винт при вращении вместе с телом. Рассмотрим вращение тела вокруг фиксированной оси. Если установить эту ось внутри кольца, которое в свою очередь закреплено на оси, вставленной внутрь другого кольца, мы можем придать вращение телу внутри первого кольца с угловой скоростью w1 и затем заставить внутреннее кольцо (и тело) вращаться с угловой скоростью w2. Рисунок 7 поясняет суть дела; круговые стрелки показывают направления вращения. Данное тело - это твердая сфера с центром О и радиусом r.

Рис. 7. СФЕРА С ЦЕНТРОМ O, вращается с угловой скоростью w1 внутри кольца BC, которое, в свою очередь, вращается внутри кольца DE с угловой скоростью w2. Сфера вращается с угловой скоростью, равной сумме угловых скоростей и все точки на прямой POP" находятся в состоянии мгновенного покоя.
Придадим этому телу движение, которое является суммой двух различных угловых скоростей. Это движение довольно трудно представить наглядно, но достаточно очевидно, что тело больше не вращается относительно фиксированной оси. Однако все-таки можно сказать, что оно вращается. Чтобы показать это, выберем некоторую точку P на поверхности тела, которая в рассматриваемый нами момент времени находится на большом круге, соединяющем точки, в которых две оси пересекают поверхность сферы. Опустим перпендикуляры из P на оси. Эти перпендикуляры станут радиусами PJ и PK окружностей PQRS и PTUW соответственно. Проведем прямую POPў, проходящую через центр сферы. Теперь точка P, в рассматриваемый момент времени одновременно перемещается по окружностям, которые соприкасаются в точке P. За малый интервал времени Dt, P перемещается на расстояние
Это расстояние равно нулю, если

В этом случае точка P находится в состоянии мгновенного покоя, и точно также все точки на прямой POP". Остальная часть сферы будет в движении (окружности, по которым перемещаются другие точки, не касаются, а пересекаются). POPў является, таким образом, мгновенной осью вращения сферы, подобно тому, как колесо, катящееся по дороге в каждый момент времени, вращается относительно своей нижней точки. Чему равна угловая скорость сферы? Выберем для простоты точку A, в которой ось w1 пересекает поверхность. В момент времени, который мы рассматриваем, она перемещается за время Dt на расстояние
По кругу радиуса r sin w1. По определению, угловая скорость

Из этой формулы и соотношения (1) мы получим
Другими словами, если записать численное значение и выбрать направление угловой скорости так, как это описано выше, то эти величины складываются как векторы и могут быть рассмотрены как таковые. Теперь можно ввести векторное произведение; рассмотрим тело, вращающееся с угловой скоростью w. Выберем любую точку P на теле и любое начало координат О, которое находится на оси вращения. Пусть r - вектор, направленный от О к P. Точка P движется по окружности со скоростью V = w r sin (w, r). Вектор скорости V является касательным к окружности и указывает в направлении, показанном на рис. 8.

Это уравнение дает зависимость скорости V точки от комбинации двух векторов w и r. Используем это соотношение, чтобы определить новый вид произведения, и запишем: V = w * r. Так как результатом такого умножения является вектор, это произведение названо векторным. Для любых двух векторов A и B, если A * B = C, то C = AB sin бA, Bс, и направление вектора C таково, что он перпендикулярен плоскости, проходящей через А и B и указывает в направлении, совпадающем с направлением движения правовращающегося винта, если он параллелен C и вращается от A к B. Другими словами, мы можем сказать, что A, B и C, расположенные в таком порядке, образуют правый набор координатных осей. Векторное произведение антикоммутативно; вектор B * A имеет тот же модуль, что и A * B, но направлен в противоположную сторону: A * B = -B * A. Это произведение дистрибутивно, но не ассоциативно; можно доказать, что

Посмотрим, как записывается векторное произведение в терминах компонент и единичных векторов. Прежде всего, для любого вектора A, A * A = AA sin 0 = 0.
Следовательно, в случае единичных векторов, i * i = j * j = k * k = 0 и i * j = k, j * k = i, k * i = j. Тогда,
Это равенство также можно записать в виде определителя:

Если A * B = 0, то либо A или B равно 0, либо A и B коллинеарны. Таким образом, как и в случае скалярного произведения, деление на вектор невозможно. Величина A * B равна площади параллелограмма со сторонами A и B. Это легко видеть, так как B sin бA, Bс - его высота и A - основание. Существует много других физических величин, которые являются векторными произведениями. Одно из наиболее важных векторных произведений появляется в теории электромагнетизма и называется вектором Пойтинга P. Этот вектор задается следующим образом: P = E * H, где E и H - векторы электрического и магнитного полей соответственно. Вектор P можно рассматривать как заданный поток энергии в ваттах на квадратный метр в любой точке. Приведем еще несколько примеров: момент силы F (крутящий момент) относительно начала координат, действующей на точку, радиус-вектор которой r, определяется как r * F; частица, находящаяся в точке r, массой m и скоростью V, имеет угловой момент mr * V относительно начала координат; сила, действующая на частицу, несущую электрический заряд q через магнитное поле B со скоростью V, есть qV * B.
Тройные произведения.
Из трех векторов мы можем сформировать следующие тройные произведения: вектор (A*B) * C; вектор (A * B) * C; скаляр (A * B)*C. Первый тип - произведение вектора C и скаляра A*B; о таких произведениях мы уже говорили. Второй тип называется двойным векторным произведением; вектор A * B перпендикулярен к плоскости, где лежат A и B, и поэтому (A * B) * C - вектор, лежащий в плоскости A и B и перпендикулярный C. Следовательно, в общем случае, (A * B) * C не равно A * (B * C). Записав A, B и C через их координаты (компоненты) по осям x, y и z и умножив, можно показать, что A * (B * C) = B * (A*C) - C * (A*B). Третий тип произведения, который возникает при расчетах решетки в физике твердого тела, численно равен объему параллелепипеда с ребрами A, B, C. Так как (A * B)*C = A*(B * C), знаки скалярного и векторного умножений можно менять местами, и произведение часто записывается как (A B C). Это произведение равно определителю

Заметим, что (A B C) = 0, если все три вектора лежат в одной и той же плоскости или, если А = 0 или (и) В = 0 или (и) С = 0.
ДИФФЕРЕНЦИРОВАНИЕ ВЕКТОРА
Предположим, что вектор U является функцией одной скалярной переменной t. Например, U может быть радиус-вектором, проведенным из начала координат до перемещающейся точки, а t - временем. Пусть t изменится на небольшую величину Dt, что приведет к изменению U на величину DU. Это показано на рис. 9. Отношение DU/Dt - вектор, направленный в том же направлении, что и DU. Мы можем определить производную U по t, как


при условии, что такой предел существует. С другой стороны, можно представить U как сумму компонент по трем осям и записать

Если U - радиус-вектор r, то dr/dt - скорость точки, выраженная как функция времени. Продифференцировав по времени еще раз, мы получим ускорение. Предположим, что точка перемещается вдоль кривой, показанной на рис. 10. Пусть s - расстояние, пройденное точкой вдоль кривой. В течение малого интервала времени Dt точка пройдет расстояние Ds вдоль кривой; положение радиус-вектора изменится на Dr. Следовательно Dr/Ds - вектор направленный как Dr. Далее

Вектор Dr - изменение радиус-вектора.

есть единичный вектор, касательный к кривой. Это видно из того, что при приближении точки Q к точке P, PQ приближается к касательной и Dr приближается к Ds. Формулы для дифференцирования произведения подобны формулам для дифференцирования произведения скалярных функций; однако, так как векторное произведение антикоммутативно, порядок умножения должен быть сохранен. Поэтому,

Таким образом, мы видим, что, если вектор является функцией одной скалярной переменной, то мы можем представить производную почти также, как в случае скалярной функции.
Вектор и скалярные поля. Градиент.
В физике часто приходится иметь дело с векторными или скалярными величинами, которые меняются от точки к точке в заданной области. Такие области называются "полями". Например, скаляр может быть температурой или давлением; вектор может быть скоростью движущейся жидкости или электростатическим полем системы зарядов. Если мы выбрали некоторую систему координат, то любой точке P (x, y, z) в заданной области соответствует некоторый радиус-вектор r (= xi + yj + zk) и также значение векторной величины U (r) или скаляра f (r), связанных с ним. Предположим, что U и f определены в области однозначно; т.е. каждой точке соответствует одна и только одна величина U или f, хотя различные точки могут, конечно, иметь различные значения. Допустим, что мы хотим описать скорость, с которой U и f изменяются при передвижении по этой области. Простые частные производные, такие, как dU/dx и df/dy, нас не устраивают, потому что они зависят от конкретно выбранных координатных осей. Однако можно ввести векторный дифференциальный оператор, независимый от выбора осей координат; этот оператор называется "градиентом". Пусть мы имеем дело со скалярным полем f. Сначала в качестве примера рассмотрим контурную карту области страны. В этом случае f - высота над уровнем моря; контурные линии соединяют точки с одним и тем же значением f. При движении вдоль любой из этих линий f не меняется; если двигаться перпендикулярно этим линиям, то скорость изменения f будет максимальной. Мы можем каждой точке сопоставить вектор, указывающий величину и направление максимального изменения скорости f; такая карта и некоторые из этих векторов показаны на рис. 11. Если мы проделаем это для каждой точки поля, то получим векторное поле, связанное со скалярным полем f. Это поле вектора, называемого "градиентом" f, который записывается как grad f или Сf (символ С также называется "набла").

В случае трех измерений, контурные линии становятся поверхностями. Малое смещение Dr (= iDx + jDy + kDz) приводит к изменению f, которое записывается как

где точками обозначены члены более высоких порядков. Это выражение можно записать в виде скалярного произведения

Разделим правую и левую части этого равенства на Ds, и пусть Ds стремится к нулю; тогда

где dr/ds - единичный вектор в выбранном направлении. Выражение в круглых скобках - вектор, зависящий от выбранной точки. Таким образом, df/ds имеет максимальное значение, когда dr/ds указывает в том же направлении, выражение, стоящее в скобках, является градиентом. Таким образом,

- вектор, равный по величине и совпадающий по направлению с максимальной скоростью изменения f относительно координат. Градиент f часто записывается в виде

Это означает, что оператор С существует сам по себе. Во многих случаях он ведет себя как вектор и фактически является "векторным дифференциальным оператором" - одним из наиболее важных дифференциальных операторов в физике. Несмотря на то, что С содержит единичные векторы i, j и k, его физический смысл не зависит от выбранной системы координат. Какова связь между Сf и f? Прежде всего предположим, что f определяет потенциал в любой точке. При любом малом смещении Dr величина f изменится на
![]()
Если q - величина (например масса, заряд), перемещенная на Dr, то работа, выполненная при перемещении q на Dr равна
![]()
Так как Dr - перемещение, то qСf - сила; -Сf - напряженность (сила на единицу количества), связанная с f. Например, пусть U - электростатический потенциал; тогда E - напряженность электрического поля, задается формулой E = -СU. Допустим, что U создается точечным электрическим зарядом в q кулонов, помещенным в начало координат. Значение U в точке P (x, y, z) с радиус-вектором r задается формулой
Где e0 - диэлектрическая постоянная свободного пространства. Поэтому

откуда следует, что E действует в направлении r и его величина равна q/(4pe0r3). Зная скалярное поле, можно определить связанное с ним векторное поле. Также возможно и обратное. С точки зрения математической обработки скалярными полями оперировать легче, чем векторными, так как они задаются одной функцией координат, в то время как векторное поле требует три функции, соответствующие компонентам вектора в трех направлениях. Таким образом, возникает вопрос: дано векторное поле, может ли мы записать связанное с ним скалярное поле?
Дивергенция и ротор.
Мы видели результат действия С на скалярную функцию. Что произойдет, если С применить к вектору? Имеются две возможности: пусть U (x, y, z) - вектор; тогда мы можем образовать векторное и скалярное произведения следующим образом:


Первое из этих выражений - скаляр, называемый дивергенцией U (обозначается divU); второе - вектор, названный ротор U (обозначается rotU). Эти дифференциальные функции, дивергенция и ротор, широко используются в математической физике. Представьте, что U - некоторый вектор и что он и его первые производные непрерывны в некоторой области. Пусть P - точка в этой области, окруженная малой замкнутой поверхностью S, ограничивающей объем DV. Пусть n - единичный вектор, перпендикулярный к этой поверхности в каждой точке (n меняет направление при движении вокруг поверхности, но всегда имеет единичную длину); пусть n направлен наружу. Покажем, что
Здесь S указывает, что эти интегралы берутся по всей поверхности, da - элемент поверхности S. Для простоты мы выберем удобную для нас форму S в виде небольшого параллелепипеда (как показано на рис. 12) со сторонами Dx, Dy и Dz; точка P - центр параллелепипеда. Вычислим интеграл из уравнения (4) сначала по одной грани параллелепипеда. Для передней грани n = i (единичный вектор параллелен оси x); Da = DyDz. Вклад в интеграл от передней грани равен

На противоположной грани n = -i; эта грань дает вклад в интеграл

Используя теорему Тейлора, получим общий вклад от двух граней
Заметим, что DxDyDz = DV. Аналогичным образом можно вычислить вклад от двух других пар граней. Полный интеграл равен

и если мы положим DV (r) 0, то члены более высокого порядка исчезнут. По формуле (2) выражение в скобках - это divU, что доказывает равенство (4). Равенство (5) можно доказать таким же образом. Воспользуемся снова рис. 12; тогда вклад от передней грани в интеграл будет равен
И, используя теорему Тейлора, получим, что суммарный вклад в интеграл от двух граней имеет вид

т.е. это два члена из выражения для rotU в уравнении (3). Другие четыре члена получатся после учета вкладов от других четырех граней. Что, в сущности, означают эти соотношения? Рассмотрим равенство (4). Предположим, что U - скорость (жидкости, например). Тогда nЧU da = Un da, где Un является нормальной компонентой вектора U к поверхности. Поэтому, Un da - это объем жидкости, протекающей через da в единицу времени, а- это объем жидкости, вытекающей через S в единицу времени. Следовательно,
Скорость расширения единицы объема вокруг точки P. Отсюда дивергенция получила свое название; она показывает скорость, с которой жидкость расширяется из (т.е. расходится от) P. Чтобы объяснить физическое значение ротора U, рассмотрим другой поверхностный интеграл по маленькому цилиндрическому объему высотой h, окружающему точку P; плоско-параллельные поверхности могут быть ориентированы в любом направлении, которое мы выбираем. Пусть k -единичный вектор перпендикулярный к каждой поверхности, и пусть площадь каждой поверхности DA; тогда полный объем DV = hDA (рис. 13). Рассмотрим теперь интеграл

![]()
Подынтегральное выражение - уже упоминавшееся ранее тройное скалярное произведение. Это произведение будет равно нулю на плоских поверхностях, где k и n параллельны. На кривой поверхности
Где ds - элемент кривой как показано на рис. 13. Сравнивая эти равенства с соотношением (5), получаем, что
Мы по-прежнему предполагаем, что U - скорость. Чему в таком случае будет равна средняя угловая скорость жидкости вокруг k? Очевидно, что

если DA не равно 0. Это выражение максимально, когда k и rotU указывают в одном и том же направлении; это означает, что rotU - вектор, равный удвоенной угловой скорости жидкости в точке P. Если жидкость вращается относительно P, то rotU № 0, и векторы U будут вращаться вокруг P. Отсюда и возникло название ротора. Теорема дивергенции (теорема Остроградского - Гаусса) является обобщением формулы (4) для конечных объемов. Она утверждает, что для некоторого объема V, ограниченного замкнутой поверхностью S,
И справедлива для всех непрерывных векторных функций U, имеющих непрерывные первые производные всюду в V и на S. Мы не будем приводить здесь доказательство этой теоремы, но ее справедливость можно понять интуитивно, представляя объем V разделенным на ячейки. Поток U через поверхность, общую для двух ячеек обращается в нуль, и только ячейки, находящиеся на границе S внесут вклад в поверхностный интеграл. Теорема Стокса является обобщением уравнения (6) для конечных поверхностей. Она утверждает, что
Наконец-то у меня добрались руки до обширной и долгожданной темы аналитической геометрии . Сначала немного о данном разделе высшей математики…. Наверняка вам сейчас вспомнился курс школьной геометрии с многочисленными теоремами, их доказательствами, чертежами и т.д. Что скрывать, нелюбимый и часто малопонятный предмет для значительной доли учеников. Аналитическая геометрия, как ни странно, может показаться более интересной и доступной. Что означает прилагательное «аналитическая»? На ум сразу приходят два штампованных математических оборота: «графический метод решения» и «аналитический метод решения». Графический метод , понятно, связан с построением графиков, чертежей. Аналитический же метод предполагает решение задач преимущественно посредством алгебраических действий. В этой связи алгоритм решений практически всех задач аналитической геометрии прост и прозрачен, зачастую достаточно аккуратно применить нужные формулы – и ответ готов! Нет, конечно, совсем без чертежей тут не обойдется, к тому же для лучшего понимания материала я постараюсь приводить их сверх необходимости.
Открываемый курс уроков по геометрии не претендует на теоретическую полноту, он ориентирован на решение практических задач. Я включу в свои лекции только то, что с моей точки зрения, является важным в практическом плане. Если вам необходима более полная справка по какому-либо подразделу, рекомендую следующую вполне доступную литературу:
1) Вещь, с которой, без шуток, знакомо несколько поколений: Школьный учебник по геометрии , авторы – Л.С. Атанасян и Компания . Сия вешалка школьной раздевалки уже выдержала 20-ть (!) переизданий, что, конечно, не является пределом.
2) Геометрия в 2 томах . Авторы Л.С. Атанасян, Базылев В.Т . Это литература для высшей школы, вам потребуется первый том . Из моего поля зрения могут выпадать редко встречающиеся задачи, и учебное пособие окажет неоценимую помощь.
Обе книги можно бесплатно закачать в Интернете. Кроме того, можете использовать мой архив с готовыми решениями, который можно найти на странице Скачать примеры по высшей математике .
Из инструментальных средств предлагаю опять же собственную разработку – программный комплекс по аналитической геометрии, который значительно упростит жизнь и сэкономит массу времени.
Предполагается, что читатель знаком с базовыми геометрическими понятиями и фигурами: точка, прямая, плоскость, треугольник, параллелограмм, параллелепипед, куб и т.д. Желательно помнить некоторые теоремы, хотя бы теорему Пифагора, привет второгодникам)
А сейчас мы последовательно рассмотрим: понятие вектора, действия с векторами, координаты вектора. Далее рекомендую прочитать важнейшую статью Скалярное произведение векторов , а также и Векторное и смешанное произведение векторов . Не лишней будет и локальная задача – Деление отрезка в данном отношении . На основе вышеуказанной информации можно освоить уравнение прямой на плоскости с простейшими примерами решений , что позволит научиться решать задачи по геометрии . Также полезны следующие статьи: Уравнение плоскости в пространстве , Уравнения прямой в пространстве , Основные задачи на прямую и плоскость , другие разделы аналитической геометрии. Естественно, попутно будут рассматривать типовые задания.
Понятие вектора. Свободный вектор
Сначала повторим школьное определение вектора. Вектором называется направленный отрезок, для которого указано его начало и конец:
В данном случае началом отрезка является точка , концом отрезка – точка . Сам вектор обозначен через . Направление имеет существенное значение, если переставить стрелку в другой конец отрезка, то получится вектор , и это уже совершенно другой вектор . Понятие вектора удобно отождествлять с движением физического тела: согласитесь, зайти в двери института или выйти из дверей института – это совершенно разные вещи.
Отдельные точки плоскости, пространства удобно считать так называемым нулевым вектором . У такого вектора конец и начало совпадают.
!!! Примечание: Здесь и далее можете считать, что векторы лежат в одной плоскости или можете считать, что они расположены в пространстве – суть излагаемого материала справедлива и для плоскости и для пространства.
Обозначения: Многие сразу обратили внимание на палочку без стрелочки в обозначении и сказали, там же вверху еще стрелку ставят! Верно, можно записать со стрелкой: , но допустима и запись , которую я буду использовать в дальнейшем . Почему? Видимо, такая привычка сложилась из практических соображений, слишком разнокалиберными и мохнатыми получались мои стрелки в школе и ВУЗе. В учебной литературе иногда вообще не заморачиваются клинописью, а выделяют буквы жирным шрифтом: , подразумевая тем самым, что это вектор.
То была стилистика, а сейчас о способах записи векторов:
1) Векторы можно записать двумя большими латинскими буквами:![]() и так далее. При этом первая буква обязательно
обозначает точку-начало вектора, а вторая буква – точку-конец вектора.
и так далее. При этом первая буква обязательно
обозначает точку-начало вектора, а вторая буква – точку-конец вектора.
2) Векторы также записывают маленькими латинскими буквами:
В частности, наш вектор можно для краткости переобозначить маленькой латинской буквой .
Длиной или модулем ненулевого вектора называется длина отрезка . Длина нулевого вектора равна нулю. Логично.
Длина вектора обозначается знаком модуля: ,
Как находить длину вектора мы узнаем (или повторим, для кого как) чуть позже.
То были элементарные сведения о векторе, знакомые всем школьникам. В аналитической же геометрии рассматривается так называемый свободный вектор .
Если совсем просто – вектор можно отложить от любой точки
:
Такие векторы мы привыкли называть равными (определение равных векторов будет дано ниже), но чисто с математической точки зрения это ОДИН И ТОТ ЖЕ ВЕКТОР или свободный вектор . Почему свободный? Потому что в ходе решения задач вы можете «пристроить» тот или иной вектор в ЛЮБУЮ, нужную вам точку плоскости или пространства. Это очень крутое свойство! Представьте вектор произвольной длины и направления – его можно «клонировать» бесконечное количество раз и в любой точке пространства, по сути, он существует ВЕЗДЕ. Есть такая студенческая присказка: Каждому лектору в ж**у по вектору. Ведь не просто остроумная рифма, всё математически корректно – вектор можно пристроить и туда. Но не спешите радоваться, чаще страдают сами студенты =)
Итак, свободный вектор – это множество одинаковых направленных отрезков. Школьное определение вектора, данное в начале параграфа: «Вектором называется направленный отрезок…», подразумевает конкретный направленный отрезок, взятый из данного множества, который привязан к определённой точке плоскости или пространства.
Следует отметить, что с точки зрения физики понятие свободного вектора в общем случае некорректно, и точка приложения вектора имеет значение. Действительно, прямой удар одинаковой силы по носу или по лбу хватит развивать мой дурацкий пример влёчет разные последствия. Впрочем, несвободные векторы встречаются и в курсе вышмата (не ходите туда:)).
Действия с векторами. Коллинеарность векторов
В школьном курсе геометрии рассматривается ряд действий и правил с векторами: сложение по правилу треугольника, сложение по правилу параллелограмма, правило разности векторов, умножения вектора на число, скалярное произведение векторов и др. Для затравки повторим два правила, которые особенно актуальны для решения задач аналитической геометрии.
Правило сложения векторов по правилу треугольников
Рассмотрим два произвольных ненулевых вектора и :
Требуется найти сумму данных векторов. В силу того, что все векторы считаются свободными, отложим вектор от конца
вектора :
Суммой векторов и является вектор . Для лучшего понимания правила в него целесообразно вложить физический смысл: пусть некоторое тело совершило путь по вектору , а затем по вектору . Тогда сумма векторов представляет собой вектор результирующего пути с началом в точке отправления и концом в точке прибытия. Аналогичное правило формулируется для суммы любого количества векторов. Как говорится, тело может пройти свой путь сильно поддатым по зигзагу, а может и на автопилоте – по результирующему вектору суммы.
Кстати, если вектор отложить от начала вектора , то получится эквивалентное правило параллелограмма сложения векторов.
Сначала о коллинеарности векторов. Два вектора называются коллинеарными , если они лежат на одной прямой или на параллельных прямых. Грубо говоря, речь идёт о параллельных векторах. Но применительно к ним всегда используют прилагательное «коллинеарные».
Представьте два коллинеарных вектора. Если стрелки данных векторов направлены в одинаковом направлении, то такие векторы называются сонаправленными . Если стрелки смотрят в разные стороны, то векторы будут противоположно направлены .
Обозначения: коллинеарность векторов записывают привычным значком параллельности: , при этом возможна детализация: (векторы сонаправлены) или (векторы направлены противоположно).
Произведением ненулевого вектора на число является такой вектор , длина которого равна , причём векторы и сонаправлены при и противоположно направлены при .
Правило умножения вектора на число легче понять с помощью рисунка: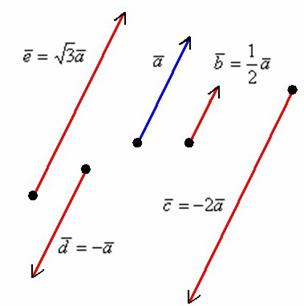
Разбираемся более детально:
1) Направление. Если множитель отрицательный, то вектор меняет направление на противоположное.
2) Длина. Если множитель заключен в пределах или , то длина вектора уменьшается . Так, длина вектора в два раза меньше длины вектора . Если множитель по модулю больше единицы, то длина вектора увеличивается в раз.
3) Обратите внимание, что все векторы коллинеарны , при этом один вектор выражен через другой, например, . Обратное тоже справедливо : если один вектор можно выразить через другой, то такие векторы обязательно коллинеарны. Таким образом: если мы умножаем вектор на число, то получится коллинеарный (по отношению к исходному) вектор .
4) Векторы сонаправлены. Векторы и также сонаправлены. Любой вектор первой группы противоположно направлен по отношению к любому вектору второй группы.
Какие векторы являются равными?
Два вектора равны, если они сонаправлены и имеют одинаковую длину . Заметьте, что сонаправленность подразумевает коллинеарность векторов. Определение будет неточным (избыточным), если сказать: «Два вектора равны, если они коллинеарны, сонаправлены и имеют одинаковую длину».
С точки зрения понятия свободного вектора, равные векторы – это один и тот же вектор, о чём уже шла речь в предыдущем параграфе.
Координаты вектора на плоскости и в пространстве
Первым пунктом рассмотрим векторы на плоскости. Изобразим декартову прямоугольную систему координат и от начала координат отложим единичные векторы и :

Векторы и ортогональны . Ортогональны = Перпендикулярны. Рекомендую потихоньку привыкать к терминам: вместо параллельности и перпендикулярности используем соответственно слова коллинеарность и ортогональность .
Обозначение: ортогональность векторов записывают привычным значком перпендикулярности, например: .
Рассматриваемые векторы называют координатными векторами или ортами . Данные векторы образуют базис на плоскости. Что такое базис, думаю, интуитивно многим понятно, более подробную информацию можно найти в статье Линейная (не) зависимость векторов. Базис векторов .Простыми словами, базис и начало координат задают всю систему – это своеобразный фундамент, на котором кипит полная и насыщенная геометрическая жизнь.
Иногда построенный базис называют ортонормированным базисом плоскости: «орто» – потому что координатные векторы ортогональны, прилагательное «нормированный» означает единичный, т.е. длины векторов базиса равны единице.
Обозначение: базис обычно записывают в круглых скобках, внутри которых в строгой последовательности перечисляются базисные векторы, например: . Координатные векторы нельзя переставлять местами.
Любой
вектор плоскости единственным образом
выражается в виде:![]() , где – числа
, которые называются координатами вектора
в данном базисе. А само выражение
, где – числа
, которые называются координатами вектора
в данном базисе. А само выражение ![]() называется разложением вектора
по базису
.
называется разложением вектора
по базису
.
Ужин подан:

Начнем с первой буквы алфавита: . По чертежу хорошо видно, что при разложении вектора по базису используются только что рассмотренные:
1) правило умножения вектора на число: и ;
2) сложение векторов по правилу треугольника: .
А теперь мысленно отложите вектор от любой другой точки плоскости. Совершенно очевидно, что его разложение будет «неотступно следовать за ним». Вот она, свобода вектора – вектор «всё носит при себе». Это свойство, разумеется, справедливо для любого вектора. Забавно, что сами базисные (свободные) векторы не обязательно откладывать от начала координат, один можно нарисовать, например, слева внизу, а другой – справа вверху, и от этого ничего не изменится! Правда, делать так не нужно, поскольку преподаватель тоже проявит оригинальность и нарисует вам «зачтено» в неожиданном месте.
Векторы , иллюстрируют в точности правило умножения вектора на число, вектор сонаправлен с базисным вектором , вектор направлен противоположно по отношению к базисному вектору . У данных векторов одна из координат равна нулю, дотошно можно записать так:
А базисные векторы, к слову, так: (по сути, они выражаются сами через себя).
И, наконец: , . Кстати, что такое вычитание векторов, и почему я не рассказал о правиле вычитания? Где-то в линейной алгебре, уже не помню где, я отмечал, что вычитание – это частный случай сложения. Так, разложения векторов «дэ» и «е» преспокойно записываются в виде суммы: , ![]() . Переставьте слагаемые местами и проследите по чертежу, как чётко в этих ситуациях работает старое доброе сложение векторов по правилу треугольника.
. Переставьте слагаемые местами и проследите по чертежу, как чётко в этих ситуациях работает старое доброе сложение векторов по правилу треугольника.
Рассмотренное разложение вида ![]() иногда называют разложением вектора в системе орт
(т.е. в системе единичных векторов). Но это не единственный способ записи вектора, распространён следующий вариант:
иногда называют разложением вектора в системе орт
(т.е. в системе единичных векторов). Но это не единственный способ записи вектора, распространён следующий вариант:
Или со знаком равенства:
Сами базисные векторы записываются так: и
То есть, в круглых скобках указываются координаты вектора. В практических задачах используются все три варианта записи.
Сомневался, говорить ли, но всё-таки скажу: координаты векторов переставлять нельзя . Строго на первом месте записываем координату, которая соответствует единичному вектору , строго на втором месте записываем координату, которая соответствует единичному вектору . Действительно, и – это ведь два разных вектора.
С координатами на плоскости разобрались. Теперь рассмотрим векторы в трехмерном пространстве, здесь практически всё так же! Только добавится ещё одна координата. Трехмерные чертежи выполнять тяжко, поэтому ограничусь одним вектором, который для простоты отложу от начала координат:
Любой
вектор трехмерного пространства можно единственным способом
разложить по ортонормированному базису : ![]() , где – координаты вектора (числа) в данном базисе.
, где – координаты вектора (числа) в данном базисе.
Пример с картинки: ![]() . Давайте посмотрим, как здесь работают правила действий с векторами. Во-первых, умножение вектора на число: (красная стрелка), (зеленая стрелка) и (малиновая стрелка). Во-вторых, перед вами пример сложения нескольких, в данном случае трёх, векторов: . Вектор суммы начинается в исходной точке отправления (начало вектора ) и утыкается в итоговую точку прибытия (конец вектора ).
. Давайте посмотрим, как здесь работают правила действий с векторами. Во-первых, умножение вектора на число: (красная стрелка), (зеленая стрелка) и (малиновая стрелка). Во-вторых, перед вами пример сложения нескольких, в данном случае трёх, векторов: . Вектор суммы начинается в исходной точке отправления (начало вектора ) и утыкается в итоговую точку прибытия (конец вектора ).
Все векторы трехмерного пространства, естественно, тоже свободны, попробуйте мысленно отложить вектор от любой другой точки, и вы поймёте, что его разложение «останется при нём».
Аналогично плоскому случаю, помимо записи ![]() широко используются версии со скобками: либо .
широко используются версии со скобками: либо .
Если в разложении отсутствует один (или два) координатных вектора, то вместо них ставятся нули. Примеры:
вектор (дотошно ![]() ) – запишем ;
) – запишем ;
вектор (дотошно ![]() ) – запишем ;
) – запишем ;
вектор (дотошно ![]() ) – запишем .
) – запишем .
Базисные векторы записываются следующим образом:
Вот, пожалуй, и все минимальные теоретические знания, необходимые для решения задач аналитической геометрии. Возможно многовато терминов и определений, поэтому чайникам рекомендую перечитать и осмыслить данную информацию ещё раз. Да и любому читателю будет полезно время от времени обращаться к базовому уроку для лучшего усвоения материала. Коллинеарность, ортогональность, ортонормированный базис, разложение вектора – эти и другие понятия будут часто использоваться в дальнейшем. Отмечу, что материалов сайта недостаточно для сдачи теоретического зачета, коллоквиума по геометрии, так как все теоремы (к тому же без доказательств) я аккуратно шифрую – в ущерб научному стилю изложения, но плюсом к вашему пониманию предмета. Для получения обстоятельной теоретической справки прошу следовать на поклон к профессору Атанасяну.
А мы переходим к практической части:
Простейшие задачи аналитической геометрии.
Действия с векторами в координатах
Задания, которые будут рассмотрены, крайне желательно научиться решать на полном автомате, а формулы запомнить наизусть , даже специально не запоминать, сами запомнятся =) Это весьма важно, поскольку на простейших элементарных примерах базируются другие задачи аналитической геометрии, и будет досадно тратить дополнительное время на поедание пешек. Не нужно застёгивать верхние пуговицы на рубашке, многие вещи знакомы вам со школы.
Изложение материала пойдет параллельным курсом – и для плоскости, и для пространства. По той причине, что все формулы… сами увидите.
Как найти вектор по двум точкам?
Если даны две точки плоскости и , то вектор имеет следующие координаты:![]()
Если даны две точки пространства и , то вектор имеет следующие координаты:
То есть, из координат конца вектора нужно вычесть соответствующие координаты начала вектора .
Задание: Для тех же точек запишите формулы нахождения координат вектора . Формулы в конце урока.
Пример 1
Даны две точки плоскости и . Найти координаты вектора
Решение:
по соответствующей формуле:
Как вариант, можно было использовать следующую запись:
Эстеты решат и так:
Лично я привык к первой версии записи.
Ответ:
По условию не требовалось строить чертежа (что характерно для задач аналитической геометрии), но в целях пояснения некоторых моментов чайникам, не поленюсь:
Обязательно нужно понимать различие между координатами точек и координатами векторов :
Координаты точек – это обычные координаты в прямоугольной системе координат. Откладывать точки на координатной плоскости, думаю, все умеют ещё с 5-6 класса. Каждая точка обладает строгим местом на плоскости, и перемещать их куда-либо нельзя.
Координаты же вектора – это его разложение по базису , в данном случае . Любой вектор является свободным, поэтому при необходимости мы легко можем отложить его от какой-нибудь другой точки плоскости. Интересно, что для векторов можно вообще не строить оси, прямоугольную систему координат, нужен лишь базис, в данном случае ортонормированный базис плоскости .
Записи координат точек и координат векторов вроде бы схожи: , а смысл координат абсолютно разный , и вам следует хорошо понимать эту разницу. Данное отличие, разумеется, справедливо и для пространства.
Дамы и господа, набиваем руку:
Пример 2
а) Даны точки и . Найти векторы и .
б) Даны точки ![]() и . Найти векторы и .
и . Найти векторы и .
в) Даны точки и . Найти векторы и .
г) Даны точки . Найти векторы ![]() .
.
Пожалуй, достаточно. Это примеры для самостоятельного решения, постарайтесь ими не пренебрегать, окупится;-). Чертежи делать не нужно. Решения и ответы в конце урока.
Что важно при решении задач аналитической геометрии? Важно быть ПРЕДЕЛЬНО ВНИМАТЕЛЬНЫМ, чтобы не допустить мастерскую ошибку «два плюс два равно нулю». Сразу извиняюсь, если где ошибся =)
Как найти длину отрезка?
Длина, как уже отмечалось, обозначается знаком модуля.
Если даны две точки плоскости и , то длину отрезка можно вычислить по формуле
Если даны две точки пространства и , то длину отрезка можно вычислить по формуле
Примечание: Формулы останутся корректными, если переставить местами соответствующие координаты: и , но более стандартен первый вариант
Пример 3
Решение:
по соответствующей формуле:
Ответ:
![]()
Для наглядности выполню чертёж
Отрезок – это не вектор , и перемещать его куда-либо, конечно, нельзя. Кроме того, если вы выполните чертеж в масштабе: 1 ед. = 1 см (две тетрадные клетки), то полученный ответ можно проверить обычной линейкой, непосредственно измерив длину отрезка.
Да, решение короткое, но в нём есть ещё пара важных моментов, которые хотелось бы пояснить:
Во-первых, в ответе ставим размерность: «единицы». В условии не сказано, ЧТО это, миллиметры, сантиметры, метры или километры. Поэтому математически грамотным решением будет общая формулировка: «единицы» – сокращенно «ед.».
Во-вторых, повторим школьный материал, который полезен не только для рассмотренной задачи:
Обратите внимание на важный технический приём
– вынесение множителя из-под корня
. В результате вычислений у нас получился результат и хороший математический стиль предполагает вынесение множителя из-под корня (если это возможно). Подробнее процесс выглядит так: ![]() . Конечно, оставить ответ в виде не будет ошибкой – но недочетом-то уж точно и весомым аргументом для придирки со стороны преподавателя.
. Конечно, оставить ответ в виде не будет ошибкой – но недочетом-то уж точно и весомым аргументом для придирки со стороны преподавателя.
Вот другие распространенные случаи:
Нередко под корнем получается достаточно большое число, например . Как быть в таких случаях? На калькуляторе проверяем, делится ли число на 4: . Да, разделилось нацело, таким образом: ![]() . А может быть, число ещё раз удастся разделить на 4? . Таким образом:
. А может быть, число ещё раз удастся разделить на 4? . Таким образом: ![]() . У числа последняя цифра нечетная, поэтому разделить в третий раз на 4 явно не удастся. Пробуем поделить на девять: . В результате:
. У числа последняя цифра нечетная, поэтому разделить в третий раз на 4 явно не удастся. Пробуем поделить на девять: . В результате:
Готово.
Вывод: если под корнем получается неизвлекаемое нацело число, то пытаемся вынести множитель из-под корня – на калькуляторе проверяем, делится ли число на: 4, 9, 16, 25, 36, 49 и т.д.
В ходе решения различных задач корни встречаются часто, всегда пытайтесь извлекать множители из-под корня во избежание более низкой оценки да ненужных заморочек с доработкой ваших решений по замечанию преподавателя.
Давайте заодно повторим возведение корней в квадрат и другие степени:
Правила действий со степенями в общем виде можно найти в школьном учебнике по алгебре, но, думаю, из приведённых примеров всё или почти всё уже ясно.
Задание для самостоятельного решения с отрезком в пространстве:
Пример 4
Даны точки и . Найти длину отрезка .
Решение и ответ в конце урока.
Как найти длину вектора?
Если дан вектор плоскости , то его длина вычисляется по формуле .
Если дан вектор пространства , то его длина вычисляется по формуле ![]() .
.
Что такое Вектор? Значение слова «Вектор» в популярных словарях и энциклопедиях, примеры употребления термина в повседневной жизни.
Вектор Конструктивной Напряженности – Философский словарь
Необходимый элемент конструктивной напряженности, определяющий ориентацию, направленность воспроизводства, личностной культуры, личности, ее деятельности, сообществ на всех этапах общественного целого; бригады, предприятия, ведомства и т.д. воспроизводство соответствующих сообществам субкультур. В.к.н. является необходимым элементом любой дуальной оппозиции как указатель ценностной ориентации, встроенный в любую воспроизводственную деятельность субъекта. Тем самым не только имеет место членение реальности на добро и зло, но и необходимость для субъекта стремиться к добру и избегать зла. Дуальная оппозиция несет в себе позитивный и негативный, прямой и обратный В.к. Осваивая соответствующие (суб)культуры, личность тем самым приобретает определенную направленность в борьбе против дезорганизации. Каждой из ячеек общества присуща определенная конкретная направленность, противостоящая энтропии, дезорганизации. В связи с этим важнейшей проблемой существовал любого общества является степень совпадения векторов на разных этажах общества, степень совпадения В.к.н. личности и организации, бригады и предприятия и т. Любое сообщество может нормально работать, если присущий ему В.к. совпадает, значимо не расходится с В.к.н. ее членов, воссоздающих ее людей. В противном случае возникает социокультурное противоречие, порождающее дезорганизацию, которая угрожает как ростом новшеств выше приемлемого в данной субкультуре шага новизны, так и уменьшением социальной энергии ниже нижнего порога.
Вектор М. – Толковый словарь Ефремовой
1. Отрезок прямой, характеризующийся численным значением и определенной направленностью.
Вектор Ожидаемых Доходностей (expected Return Vector) – Экономический словарь
вектор чисел, соответствующих ожидаемым доходностям для данного набора ценных бумаг.
Вектор Рангов – Социологический словарь
– векторная статистика, построенная по случайному вектору наблюдений Х=(Х1, ... ,Xn) (см. Вектор), компоненты к-рой получаются следующим образом. Если все Xt различны, то компонентами В.р. служат натуральные числа от 1 до n: на месте каждого Xi стоит число, выражающее количество таких компонент вектора Xi, величина к-рых меньше величины Хi. Другими словами, на месте наибольшего по величине Хi, стоит число п, на месте следующего по величине (в порядке убывания) – (n-1) и т. д. На месте наименьшего стоит 1. Если нек-рые X. равны друг другу, то В.р. строится так: наибольшему X приписывается ранг n, следующему по величине – ранг (n-1) и т. д. до тех пор, пока после приписывания ранга (n-k) не встретятся равные Xi. Пусть это будут Xkl,... ,Xkl. Каждому из них приписываем ранг Следующему по величине Хkl 1приписываем ранг n-(к l 1), если он не равен никакой другой компоненте X, и ранг Ю.Н.Толстова
Вектор Состояния –
то же, что волновая функция.
Векторкардиография – Психологический словарь
(vectorcardiography) - см. Электрокардиография.
Векторкардиография – Психологическая энциклопедия
Векторкардиография (vectorcardiography) – Медицинский словарь
см. Электрокардиография.
Векторметр – Большой Энциклопедический Словарь
(от вектор и...метр) - прибор для измерения токов, напряженийи фазы переменного тока.
Векторметр М. – Толковый словарь Ефремовой
1. Электрический прибор для измерения напряжения или силы и фазы переменного тока.
Векторная Диаграмма – Большой Энциклопедический Словарь
графическое изображение значений физических величин,изменяющихся по гармоническому закону, и соотношений между ними в видевекторов. Применяется при расчетах в электротехнике, акустике, оптике и т.д.
Векторная Психология – Социологический словарь
См. ТЕОРИЯ ПОЛЯ.
Векторная Психология – Психологический словарь
См. обсуждение теории Левина в статье вектор(1).
Векторная Психология – Психологическая энциклопедия
Векторное Исчисление – Большой Энциклопедический Словарь
раздел математики, в котором изучаются операции надвекторами. включает векторную алгебру и векторныйанализ. Правила векторной алгебры отражают свойства действий надвекторными величинами. Напр., суммой векторов a и b называется вектор,идущий из начала вектора a в конец вектора b при условии, что началовектора b приложено к концу вектора a; это правило связано с правиломсложения сил или скоростей (см. Параллелограмм сил). В векторномисчислении установлены два типа умножения векторов (см. Скалярноепроизведение, Векторное произведение). Если i, j, k - три взаимноперпендикулярных единичных вектора в пространстве, то любой вектор aединственным образом можно представить в виде a=a1i+a2j+a3k. Числа a1, a2,a3 называются компонентами (координатами) вектора a. В основе векторногоанализа лежат операции дифференцирования и интегрирования вектор-функций.
Векторное Поле – Большой Энциклопедический Словарь
область, в каждой точке P которой задан вектор a(P). Кпонятию векторное поля приводят многие физические явления и процессы(напр., векторы скоростей частиц движущейся жидкости в каждый моментвремени образуют векторное поле).
Векторное Произведение – Большой Энциклопедический Словарь
вектора a на вектор b - вектор p=ВЕКТОРНОЕПРОСТРАНСТВО - математическое понятие, обобщающее понятие совокупностивсех векторов 3-мерного пространства на случай произвольного числаизмерений.
Векторный Подход К Психотерапии – Психологический словарь
(vector approach to psychotherapy) В. п. п. постулирует, что все многообразие терапий по существу распределяется по 6 осн. векторам, или модальностям, указывающим направление роста. Выбирая один из мн. терапевтических методов, осн. на этих векторах, эклектически ориентированный терапевт может добиться высокоэффективной сбалансированной терапевтической интеграции, а тж получить свободу выражения своих личных предпочтений и талантов. Ниже приводится классиф. методов терапии на основе этих векторов. 1. Рациональный вектор, характеризующийся инсайтом, расширением сознавания и научением: а) психоан.; б) рационально-эмотивная терапия; в) транзактный анализ; г) поведенческая терапия. 2. Нейромускулярный вектор, характеризующийся мышечным напряжением, мышечным расслаблением и движением, сопровождающимся изменениями дыхания и высвобождением эмоций: а) райхианская терапия; б) биоэнергетика; в) рольфинг; г) метод Александера; д) метод Фельденкрайса; е) танцевальная терапия. 3. Интерперсональный вектор, характеризующийся отношениями между людьми: а) группы встреч; б) психодрама; в) совместная семейная терапия; г) гештальт-терапия. 4. Вектор фантазии, характеризующийся интраперсональным опытом при выключении внешней стимуляции: а) гипнотерапия; б) психосинтез; в) направляемые фантазии в бодрствующем состоянии (guided daydreams). 5. Трансперсональный вектор, характеризующийся трансценденцией замкнутого состояния сознания индивидуума: а) духовное исцеление; б) парапсихологические феномены; в) юнгианская психология; г) медитация. 6. Биохимический вектор, характеризующийся химическими изменениями в организме, имеющими внутреннее или внешнее происхождение: а) ортомолекулярная терапия; б) карбоген; в) диетические процедуры и упражнения; г) психоделическая и психолитическая лекарственная терапия; д) седативные средства, стимуляторы и транквилизаторы. См. также Новаторские психотерапии, Методики психотерапии П. Биндрим
Содержание статьи
ВЕКТОР. В физике и математике вектор – это величина, которая характеризуется своим численным значением и направлением. В физике встречается немало важных величин, являющихся векторами, например сила, положение, скорость, ускорение, вращающий момент, импульс, напряженность электрического и магнитного полей. Их можно противопоставить другим величинам, таким, как масса, объем, давление, температура и плотность, которые можно описать обычным числом, и называются они «скалярами».
Векторная запись используется при работе с величинами, которые невозможно задать полностью с помощью обычных чисел. Например, мы хотим описать положение предмета относительно некоторой точки. Мы можем сказать, сколько километров от точки до предмета, но не можем полностью определить его местоположение, пока не узнаем направление, в котором он находится. Таким образом, местонахождение предмета характеризуется численным значением (расстоянием в километрах) и направлением.
Графически векторы изображаются в виде направленных отрезков прямой определенной длины, как на рис. 1. Например, для того чтобы представить графически силу в пять килограммов, надо нарисовать отрезок прямой длиной в пять единиц в направлении действия силы. Стрелка указывает, что сила действует от A к B ; если бы сила действовала от B к A , то мы бы записали или . Для удобства векторы обычно обозначаются полужирными прописными буквами (A , B , C и так далее); векторы A и –A имеют равные численные значения, но противоположны по направлению. Численное значение вектора А называется модулем или длиной и обозначается A или |A |. Это величина, конечно, скаляр. Вектор, начало и конец которого совпадают, называется нулевым и обозначается O .
Два вектора называются равными (или свободными ), если их модули и направления совпадают. В механике и физике этим определением, однако, надо пользоваться с осторожностью, так как две равных силы, приложенные к различным точкам тела в общем случае будут приводить к различным результатам. В связи с этим векторы подразделяются на «связанные» или «скользящие», следующим образом:
Связанные векторы имеют фиксированные точки приложения. Например, радиус-вектор указывает положение точки относительно некоторого фиксированного начала координат. Связанные векторы считаются равными, если у них совпадают не только модули и направления, но они имеют и общую точку приложения.
Скользящими векторами называются равные между собой векторы, расположенные на одной прямой.
Сложение векторов.
Идея сложения векторов возникла из того, что мы можем найти единственный вектор, который оказывает то же воздействие, что и два других вектора вместе. Если для того, чтобы попасть в некоторую точку, нам надо пройти сначала A километров в одном направлении и затем B километров в другом направлении, то мы могли бы достичь нашей конечной точки пройдя C километров в третьем направлении (рис. 2). В этом смысле можно сказать, что
A + B = C .
Вектор C называется «результирующим вектором» A и B , он задается построением, показанным на рисунке; на векторах A и B как на сторонах построен параллелограмм, а C – диагональ, соединяющая начало А и конец В . Из рис. 2 видно, что сложение векторов «коммутативно», т.е.
A + B = B + A .
Аналогичным образом можно сложить несколько векторов, последовательно соединяя их «непрерывной цепочкой», как показано на рис. 3 для трех векторов D , E и F . Из рис. 3 также видно, что
(D + E ) + F = D + (E + F ),
т.е. сложение векторов ассоциативно. Суммировать можно любое число векторов, причем векторы необязательно должны лежать в одной плоскости. Вычитание векторов представляется как сложение с отрицательным вектором. Например,
A – B = A + (–B ),
где, как определялось ранее, –B – вектор, равный В по модулю, но противоположный по направлению.
Это правило сложения может теперь использоваться как реальный критерий проверки, является ли некоторая величина вектором или нет. Перемещения обычно подчиняются условиям этого правила; то же можно сказать и о скоростях; силы складываются таким же образом, как можно было видеть из «треугольника сил». Однако, некоторые величины, обладающие как численными значениями так и направлениями, не подчиняются этому правилу, поэтому не могут рассматриваться как векторы. Примером являются конечные вращения.
Умножение вектора на скаляр.
Произведение m A или A m , где m (m № 0) – скаляр, а A – ненулевой вектор, определяется как другой вектор, который в m раз длиннее A и имеет тоже направление что и A , если число m положительно, и противоположное, если m отрицательно, как показано на рис. 4, где m равно 2 и –1/2 соответственно. Кроме того, 1A = A , т.е. при умножении на 1 вектор не изменяется. Величина –1A – вектор, равный A по длине, но противоположный по направлению, обычно записывается как –A . Если А – нулевой вектор и(или) m = 0, то m A – нулевой вектор. Умножение дистрибутивно, т.е.
Мы можем складывать любое число векторов, причем порядок слагаемых не влияет на результат. Верно и обратное: любой вектор раскладывается на две или более «компоненты», т.е. на два вектора или более, которые, будучи сложенными, в качестве результирующего дадут исходный вектор. Например, на рис. 2, A и B – компоненты C .
Многие математические действия с векторами упрощаются, если разложить вектор на три компоненты по трем взаимно перпендикулярным направлениям. Выберем правую систему декартовых координат с осями Ox , Oy и Oz как показано на рис. 5. Под правой системой координат мы подразумеваем, что оси x , y и z располагаются так, как могут быть расположены соответственно большой, указательный и средний пальцы правой руки. Из одной правой системы координат всегда можно получить другую правую систему координат соответствующим вращением. На рис. 5, показано разложение вектор A на три компоненты и . Они в сумме составляют вектор A , так как
Можно было бы также сначала сложить и получить , а затем к прибавить .
Проекции вектора А на три координатные оси, обозначенные A x , A y и A z называются «скалярными компонентами» вектора A :
где a , b и g – углы между A и тремя координатными осями. Теперь введем три вектора единичной длины i , j и k (орты), имеющие то же самое направление, что и соответствующие оси x , y и z . Тогда, если A x умножить на i , то полученное произведение – это вектор, равный , и
Два вектора равны тогда и только тогда, когда равны их соответствующие скалярные компоненты. Таким образом, A = B тогда и только тогда, когда A x = B x , A y = B y , A z = B z .
Два вектора можно сложить, складывая их компоненты:
Кроме того, по теореме Пифагора:
Линейные функции.
Выражение a A + b B , где a и b – скаляры, называется линейной функцией векторов A и B . Это вектор, находящийся в той же плоскости, что A и B ; если A и B не параллельны, то при изменении a и b вектор a A + b B будет перемещаться по всей плоскости (рис. 6). Если A , B и C не все лежат в одной плоскости, то вектор a A + b B + c C (a , b и c изменяются) перемещается по всему пространству. Предположим, что A , B и C – единичные векторы i , j и k . Вектор a i лежит на оси x ; вектор a i + b j может перемещаться по всей плоскости xy ; вектор a i + b j + c k может перемещаться по всему пространству.
Можно было бы выбрать четыре взаимно перпендикулярных вектора i , j , k и l и определить четырехмерный вектор как величину
A = A x i + A y j + A z k + A w l
а можно было бы продолжать до пяти, шести или любого числа измерений. Хотя визуально такой вектор представить невозможно, никаких математических трудностей здесь не возникает. Такая запись часто бывает полезна; например, состояние движущейся частицы описывается шестимерным вектором P (x , y , z , p x , p y , p z ), компоненты которого – ее положение в пространстве (x , y , z ) и импульс (p x , p y , p z ). Такое пространство называется «фазовым пространством»; если мы рассматриваем две частицы, то фазовое пространство 12-мерное, если три, то 18-ти и так далее. Число размерностей можно неограниченно увеличивать; при этом величины, с которыми мы будем иметь дело, ведут себя во многом также, как те, которые мы рассмотрим в оставшейся части этой статьи, а именно, трехмерные векторы.
Умножение двух векторов.
Правило сложения векторов было получено путем изучения поведения величин, представленных векторами. Нет никаких видимых причин, по которым два вектора нельзя было бы каким-либо образом перемножить, однако это умножение будет иметь смысл только в том случае, если можно показать его математическую состоятельность; кроме того, желательно, чтобы произведение имело определенный физический смысл.
Существуют два способа умножения векторов, которые соответствуют этим условиям. Результатом одного из них является скаляр, такое произведение называется «скалярным произведением» или «внутренним произведением» двух векторов и записывается A Ч B или (A , B ). Результатом другого умножения является вектор, называемый «векторным произведением» или «внешним произведением» и записывается A ґ B или [A , B ]. Скалярные произведения имеют физический смысл для одного-, двух- или трех измерений, тогда как векторные произведения определены только для трех измерений.
Скалярные произведения.
Если под действием некоторой силы F точка, к которой она приложена, перемещается на расстояние r , то выполненная работа равна произведению r и компоненты F в направлении r . Эта компонента равна F cos б F , r с , где б F , r с – угол между F и r , т.е.
Произведенная работа = Fr cos б F , r с .
Это – пример физического обоснования скалярного произведения, определенного для любых двух векторов A , B посредством формулы
AЧ B = AB cos б A , B с .
Так как все величины правой части уравнения – скаляры, то
A Ч B = B Ч A ;
следовательно, скалярное умножение коммутативно.
Скалярное умножение также обладает свойством дистрибутивности:
A Ч (B + С ) = A Ч B + A Ч С .
Если векторы A и B перпендикулярны, то cos б A , B с равен нулю, и, поэтому, A Ч B = 0, даже если ни A ,ни B не равны нулю. Именно поэтому мы не можем делить на вектор. Допустим, что мы разделили обе части уравнения A Ч B = A Ч C на A . Это дало бы B = C , и, если бы можно было бы выполнить деление, то это равенство стало бы единственным возможным результатом. Однако, если мы перепишем уравнение A Ч B = A Ч C в виде A Ч (B – C ) = 0 и вспомним, что (B – C ) – вектор, то ясно, что (B – C ) необязательно равен нулю и, следовательно, B не должен быть равным C . Эти противоречивые результаты показывают, что векторное деление невозможно.
Скалярное произведение дает еще один способ записи численного значения (модуля) вектора:
A Ч A = AA Ч cos 0° = A 2 ;
Скалярное произведение можно записать и другим способом. Для этого вспомним, что:
A = A x i + A y j + A z k .
Поскольку последнее уравнение содержит x , y и z в качестве нижних индексов, уравнение, казалось бы, зависит от выбранной конкретной системы координат. Однако это не так, что видно из определения, которое не зависит от выбранных координатных осей.
Векторные произведения.
Векторным или внешним произведением векторов называется вектор, модуль которого равен произведению их модулей на синус угла, перпендикулярный исходным векторам и составляющий вместе с ними правую тройку. Это произведение легче всего ввести, рассматривая соотношение между скоростью и угловой скоростью. Первая – вектор; мы теперь покажем, что последнюю также можно интерпретировать как вектор.
Угловая скорость вращающегося тела определяется следующим образом: выберем любую точку на теле и проведем перпендикуляр из этой точки до оси вращения. Тогда угловая скорость тела – это число радиан, на которые эта линия повернулась за единицу времени.
Если угловая скорость – вектор, она должна иметь численное значение и направление. Численное значение выражается в радианах в секунду, направление можно выбрать вдоль оси вращения, можно его определить, направив вектор в том направлении, в котором двигался бы правосторонний винт при вращении вместе с телом.
Рассмотрим вращение тела вокруг фиксированной оси. Если установить эту ось внутри кольца, которое в свою очередь закреплено на оси, вставленной внутрь другого кольца, мы можем придать вращение телу внутри первого кольца с угловой скоростью w 1 и затем заставить внутреннее кольцо (и тело) вращаться с угловой скоростью w 2.Рисунок 7 поясняет суть дела; круговые стрелки показывают направления вращения. Данное тело – это твердая сфера с центром О и радиусом r .
Придадим этому телу движение, которое является суммой двух различных угловых скоростей. Это движение довольно трудно представить наглядно, но достаточно очевидно, что тело больше не вращается относительно фиксированной оси. Однако все-таки можно сказать, что оно вращается. Чтобы показать это, выберем некоторую точку P на поверхности тела, которая в рассматриваемый нами момент времени находится на большом круге, соединяющем точки, в которых две оси пересекают поверхность сферы. Опустим перпендикуляры из P на оси. Эти перпендикуляры станут радиусами PJ и PK окружностей PQRS и PTUW соответственно. Проведем прямую POP ў , проходящую через центр сферы. Теперь точка P , в рассматриваемый момент времени одновременно перемещается по окружностям, которые соприкасаются в точке P . За малый интервал времени D t , P перемещается на расстояние
Это расстояние равно нулю, если
В этом случае точка P находится в состоянии мгновенного покоя, и точно также все точки на прямой POP ў . Остальная часть сферы будет в движении (окружности, по которым перемещаются другие точки, не касаются, а пересекаются). POP ў является, таким образом, мгновенной осью вращения сферы, подобно тому, как колесо, катящееся по дороге в каждый момент времени, вращается относительно своей нижней точки.
Чему равна угловая скорость сферы? Выберем для простоты точку A , в которой ось w 1 пересекает поверхность. В момент времени, который мы рассматриваем, она перемещается за время D t на расстояние
по кругу радиуса r sin w 1. По определению, угловая скорость
Из этой формулы и соотношения (1) мы получим
Другими словами, если записать численное значение и выбрать направление угловой скорости так, как это описано выше, то эти величины складываются как векторы и могут быть рассмотрены как таковые.
Теперь можно ввести векторное произведение; рассмотрим тело, вращающееся с угловой скоростью w . Выберем любую точку P на теле и любое начало координат О , которое находится на оси вращения. Пусть r – вектор, направленный от О к P . Точка P движется по окружности со скоростью
V = w r sin (w , r ).
Вектор скорости V является касательным к окружности и указывает в направлении, показанном на рис. 8.
Это уравнение дает зависимость скорости V точки от комбинации двух векторов w и r . Используем это соотношение, чтобы определить новый вид произведения, и запишем:
V = w ґ r .
Так как результатом такого умножения является вектор, это произведение названо векторным. Для любых двух векторов A и B , если
A ґ B = C ,
C = AB sin б A , B с ,
и направление вектора C таково, что он перпендикулярен плоскости, проходящей через А и B и указывает в направлении, совпадающем с направлением движения правовращающегося винта, если он параллелен C и вращается от A к B . Другими словами, мы можем сказать, что A , B и C , расположенные в таком порядке, образуют правый набор координатных осей. Векторное произведение антикоммутативно; вектор B ґ A имеет тот же модуль, что и A ґ B , но направлен в противоположную сторону:
A ґ B = –B ґ A .
Это произведение дистрибутивно, но не ассоциативно; можно доказать, что
Посмотрим, как записывается векторное произведение в терминах компонент и единичных векторов. Прежде всего, для любого вектора A ,
A ґ A = AA sin 0 = 0.
Следовательно, в случае единичных векторов,
i ґ i = j ґ j = k ґ k =0
i ґ j = k , j ґ k = i , k ґ i = j .
Это равенство также можно записать в виде определителя:
Если A ґ B = 0 , то либо A или B равно 0 , либо A и B коллинеарны. Таким образом, как и в случае скалярного произведения, деление на вектор невозможно. Величина A ґ B равна площади параллелограмма со сторонами A и B . Это легко видеть, так как B sin б A , B с – его высота и A – основание.
Существует много других физических величин, которые являются векторными произведениями. Одно из наиболее важных векторных произведений появляется в теории электромагнетизма и называется вектором Пойтинга P . Этот вектор задается следующим образом:
P = E ґ H ,
где E и H – векторы электрического и магнитного полей соответственно. Вектор P можно рассматривать как заданный поток энергии в ваттах на квадратный метр в любой точке. Приведем еще несколько примеров: момент силы F (крутящий момент) относительно начала координат, действующей на точку, радиус-вектор которой r , определяется как r ґ F ; частица, находящаяся в точке r , массой m и скоростью V , имеет угловой момент m r ґ V относительно начала координат; сила, действующая на частицу, несущую электрический заряд q через магнитное поле B со скоростью V , есть q V ґ B .
Тройные произведения.
Из трех векторов мы можем сформировать следующие тройные произведения: вектор (A Ч B ) ґ C ; вектор (A ґ B) ґ C ; скаляр (A ґ B )Ч C .
Первый тип – произведение вектора C и скаляра A Ч B ; о таких произведениях мы уже говорили. Второй тип называется двойным векторным произведением; вектор A ґ B перпендикулярен к плоскости, где лежат A и B , и поэтому (A ґ B )ґ C – вектор, лежащий в плоскости A и B и перпендикулярный C . Следовательно, в общем случае, (A ґ B )ґ C № A ґ (B ґ C ). Записав A , B и C через их координаты (компоненты) по осям x , y и z и умножив, можно показать, что A ґ (B ґ C ) = B ґ (A Ч C ) – Cґ (A Ч B ). Третий тип произведения, который возникает при расчетах решетки в физике твердого тела, численно равен объему параллелепипеда с ребрами A , B , C . Так как (A ґ B )Ч C = A Ч (B ґ C ), знаки скалярного и векторного умножений можно менять местами, и произведение часто записывается как (A B C ). Это произведение равно определителю
Заметим, что (A B C ) = 0, если все три вектора лежат в одной и той же плоскости или, если А = 0 или (и) В = 0 или (и) С = 0 .
ДИФФЕРЕНЦИРОВАНИЕ ВЕКТОРА
Предположим, что вектор U является функцией одной скалярной переменной t . Например, U может быть радиус-вектором, проведенным из начала координат до перемещающейся точки, а t – временем. Пусть t изменится на небольшую величину D t , что приведет к изменению U на величину D U . Это показано на рис. 9. Отношение D U /D t – вектор, направленный в том же направлении, что и D U . Мы можем определить производную U по t , как
при условии, что такой предел существует. С другой стороны, можно представить U как сумму компонент по трем осям и записать
Если U – радиус-вектор r , то d r /dt – скорость точки, выраженная как функция времени. Продифференцировав по времени еще раз, мы получим ускорение. Предположим, что точка перемещается вдоль кривой, показанной на рис. 10. Пусть s – расстояние, пройденное точкой вдоль кривой. В течение малого интервала времени D t точка пройдет расстояние D s вдоль кривой; положение радиус-вектора изменится на D r . Следовательно D r /D s – вектор направленный как D r . Далее
есть единичный вектор, касательный к кривой. Это видно из того, что при приближении точки Q к точке P , PQ приближается к касательной и D r приближается к D s.
Формулы для дифференцирования произведения подобны формулам для дифференцирования произведения скалярных функций; однако, так как векторное произведение антикоммутативно, порядок умножения должен быть сохранен. Поэтому,
Таким образом, мы видим, что, если вектор является функцией одной скалярной переменной, то мы можем представить производную почти также, как в случае скалярной функции.
Вектор и скалярные поля.
Градиент.
В физике часто приходится иметь дело с векторными или скалярными величинами, которые меняются от точки к точке в заданной области. Такие области называются «полями». Например, скаляр может быть температурой или давлением; вектор может быть скоростью движущейся жидкости или электростатическим полем системы зарядов. Если мы выбрали некоторую систему координат, то любой точке P (x , y , z ) в заданной области соответствует некоторый радиус-вектор r (= x i + y j + z k ) и также значение векторной величины U (r ) или скаляра f (r ), связанных с ним. Предположим, что U и f определены в области однозначно; т.е. каждой точке соответствует одна и только одна величина U или f , хотя различные точки могут, конечно, иметь различные значения. Допустим, что мы хотим описать скорость, с которой U и f изменяются при передвижении по этой области.
Простые частные производные, такие, как ¶ U /¶ x и ¶f /¶ y, нас не устраивают, потому что они зависят от конкретно выбранных координатных осей. Однако можно ввести векторный дифференциальный оператор, независимый от выбора осей координат; этот оператор называется «градиентом».
Пусть мы имеем дело со скалярным полем f . Сначала в качестве примера рассмотрим контурную карту области страны. В этом случае f – высота над уровнем моря; контурные линии соединяют точки с одним и тем же значением f . При движении вдоль любой из этих линий f не меняется; если двигаться перпендикулярно этим линиям, то скорость изменения f будет максимальной. Мы можем каждой точке сопоставить вектор, указывающий величину и направление максимального изменения скорости f ; такая карта и некоторые из этих векторов показаны на рис. 11. Если мы проделаем это для каждой точки поля, то получим векторное поле, связанное со скалярным полем f . Это поле вектора, называемого «градиентом» f , который записывается как grad f или Сf (символ С также называется «набла»).
В случае трех измерений, контурные линии становятся поверхностями. Малое смещение D r (= i D x + j D y + k D z ) приводит к изменению f , которое записывается как
где точками обозначены члены более высоких порядков. Это выражение можно записать в виде скалярного произведения
Разделим правую и левую части этого равенства на D s , и пусть D s стремится к нулю; тогда
где d r /ds – единичный вектор в выбранном направлении. Выражение в круглых скобках – вектор, зависящий от выбранной точки. Таким образом, df /ds имеет максимальное значение, когда d r /ds указывает в том же направлении, выражение, стоящее в скобках, является градиентом. Таким образом,
– вектор, равный по величине и совпадающий по направлению с максимальной скоростью изменения f относительно координат. Градиент f часто записывается в виде
Это означает, что оператор С существует сам по себе. Во многих случаях он ведет себя, как вектор, и фактически является «векторным дифференциальным оператором» – одним из наиболее важных дифференциальных операторов в физике. Несмотря на то, что С содержит единичные векторы i , j и k , его физический смысл не зависит от выбранной системы координат.
Какова связь между Сf и f ? Прежде всего предположим, что f определяет потенциал в любой точке. При любом малом смещении D r величина f изменится на
Если q – величина (например масса, заряд), перемещенная на D r , то работа, выполненная при перемещении q
откуда следует, что E действует в направлении r и его величина равна q /(4pe 0r 3).
Зная скалярное поле, можно определить связанное с ним векторное поле. Также возможно и обратное. С точки зрения математической обработки скалярными полями оперировать легче, чем векторными, так как они задаются одной функцией координат, в то время как векторное поле требует три функции, соответствующие компонентам вектора в трех направлениях. Таким образом, возникает вопрос: дано векторное поле, может ли мы записать связанное с ним скалярное поле?
Дивергенция и ротор.
Мы видели результат действия С на скалярную функцию. Что произойдет, если С применить к вектору? Имеются две возможности: пусть U n a da D
если D A ® 0. Это выражение максимально, когда k и rotU указывают в одном и том же направлении; это означает, что rotU – вектор, равный удвоенной угловой скорости жидкости в точке P . Если жидкость вращается относительно P, то rotU № 0, и векторы U будут вращаться вокруг P . Отсюда и возникло название ротора.
Теорема дивергенции (теорема Остроградского – Гаусса)
Теорема дивергенции (теорема Остроградского – Гаусса) является обобщением формулы (4) для конечных объемов. Она утверждает, что для некоторого объема V , ограниченного замкнутой поверхностью S ,
и справедлива для всех непрерывных векторных функций U , имеющих непрерывные первые производные всюду в V и на S . Мы не будем приводить здесь доказательство этой теоремы, но ее справедливость можно понять интуитивно, представляя объем V разделенным на ячейки. Поток U через поверхность, общую для двух ячеек обращается в нуль, и только ячейки, находящиеся на границе S внесут вклад в поверхностный интеграл.
Теорема Стокса
является обобщением уравнения (6) для конечных поверхностей. Она утверждает, что
где C – замкнутая кривая и S – любая поверхность, ограниченная этой кривой. U и ее первые производные должны быть непрерывны всюду на S и C .